Athabasca University | AU Student/Staff Login | Invited Guest Login

All Site Activity
 Susanne Cardwell commented on the blog Combobulating Continuity via Connectors and Conductors
Susanne Cardwell commented on the blog Combobulating Continuity via Connectors and Conductors- Tyler Lucas published a blog post Combobulating Continuity via Connectors and ConductorsComments
- Tyler Lucas September 28, 2017 - 1:56pm
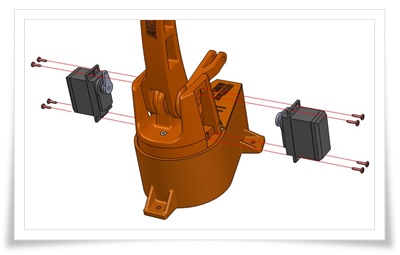
This arm isn't the easiest to explain. It's based on Carlo Franciscone's EEZYbotARM MK2, modified to have more complex connections in that my version has different size ball-bearings in nearly every joint. I'll show you some of Carlo's great assembly photos from his website:
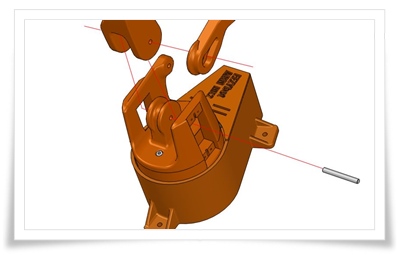
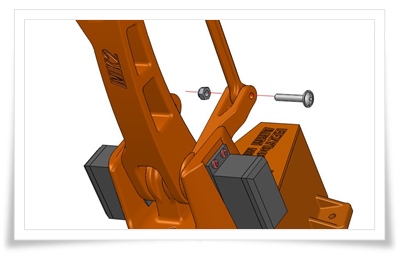
They're really just plain M3 and M3 bolts with lock nuts (nylon). I'd recommend at least a pair of washers in between the moving parts to reduce friction, and don't tighten the nut very much -- this is where the locking mechanism of the nut comes in handy, as a regular nut needs to be tightened against something or it will loosen off. I used a Power HD-1501MG and a MG946R servo and aluminum horns with M2 bolts/screws to lift the two parts of the arm.
If your arm doesn't need to lift much, don't use a bolt or anything else to support it, just attach the arm directly to the servo. The SparkFun Inventor's Kit (SIK) comes with a small servo: the "Micro Servo A0090" or "ROB-09065" or "SG90", similar to the popular Hitec HS-55. It comes with a bunch of white plastic horns. These attach to the servo output and can be screwed directly onto an arm, et voila. This is exactly what I did for my Shoddy Robotic Arm. (I actually used sticky tack to keep it together, but I don't recommend that.)
Here's the STEP file for my robot arm: [link]. It's a bit different from Carlo's MK2, and is not complete, but it shows the connections/joints clearly.
- Susanne Cardwell September 28, 2017 - 4:42pm
Nice reply. Thanks Tyler. Nice wiring on your robot too. The wires look cosmetic. Who'd ever guess something so visually nice would be primarily functional.
What program did you use to 3d print your robot? Did you measure the servos for your 3d print job?
Lastly, are there 2 servos for the sake of balance or do they kind of work like wheels? I believe that you spin one wheel faster than the other to get them to turn. Is that correct? Thank you.
- Tyler Lucas September 28, 2017 - 5:01pm
I use Autodesk Fusion 360 for 3D design, Simplify3D to slice models, and Octoprint (OctoPi on RPi2) to feed the printer with data. Any decent 3D design program can open that STEP file. I did measure the servos -- there is always a lot of measuring going on when designing connecting parts... The two servos you see in the photos above move two different parts of the arm. Mataric covers servos under 4.3.3 Servo Motors (p. 37...).
- Jon Dron bookmarked The return of the weblog – Ethical Tech
- Daniel Wilton uploaded the file CIDER Session slides October 2017 in the group Canadian Initiative for Distance Education Research - CIDER
- Anonymous commented on the blog Strategies for successful learning at AU
- peterde commented on the blog Where are all the robots?
- Gerald Ardito commented on a bookmark Amazon helps and teaches bomb makers
- Jon Dron commented on a bookmark Amazon helps and teaches bomb makers
- Gerald Ardito commented on a bookmark Amazon helps and teaches bomb makers
- Richard Huntrods commented on the blog Project Proposal: Automatic Object Relocation
- Daniel Wilton uploaded the file CIDER Session Oct 2017 recording in the group Canadian Initiative for Distance Education Research - CIDER
- Daniel Wilton uploaded the file CIDER Session Oct 2017 upcoming in the group Canadian Initiative for Distance Education Research - CIDER
- Daniel Wilton uploaded the file CIDER Session Oct 2017 banner in the group Canadian Initiative for Distance Education Research - CIDER
- Daniel Wilton uploaded the file CIDER Session Oct 2017 thumbnail in the group Canadian Initiative for Distance Education Research - CIDER
- Jon Dron bookmarked No, you aren't a 'visual' learner
- Susanne Cardwell commented on the blog Project Proposal: Automatic Object Relocation
- Tyler Lucas commented on the blog Project Proposal: Automatic Object Relocation
- Susanne Cardwell commented on the blog Project Proposal: Automatic Object Relocation

 Loading
Loading {kind=link}