Athabasca University | AU Student/Staff Login | Invited Guest Login

Activity
 Tyler Lucas added a new discussion topic How to fit non-linear functions to data in Excel?
Tyler Lucas added a new discussion topic How to fit non-linear functions to data in Excel?- Tyler Lucas commented on a bookmark This was actually accepted for an IEEE conference and then published
- Tyler Lucas commented on the blog Discombobulating Continuity
- Tyler Lucas published a blog post Discombobulating ContinuityComments
- Susanne Cardwell October 5, 2017 - 7:52pm
Good job on explaining something complex in clear language.
What electronic design program did you use? Does it allow you to design PCBs?
Also, what software do you use to visually model your Arduino circuit connections?
Thank you!
- Tyler Lucas October 5, 2017 - 8:57pm
I used Audodesk EAGLE for the above circuits. I like it's simplicity and hobbyist support. I've used KiCAD and gEDA with some success as well. The problem I find in attempting to compare EDA packages is that they each have a large learning curve. There is no way to quickly or easily compare them. Saying that, if I were to start working with electronics more regularly, I would probably go for KiCAD.
I don't have a program to visually model my Arduino connections. TinkerCAD does it, I think (they absorbed Circuits.io's Electronics Lab).
- Tyler Lucas commented on the blog Where are all the robots?
- Tyler Lucas commented on the blog Simple Control Example: Maintaining Constant Distance to Surface
- Tyler Lucas published a blog post Simple Control Example: Maintaining Constant Distance to SurfaceComments
- Susanne Cardwell October 5, 2017 - 8:38am
Hi Tyler. Great robotic arm. Very sophisticated. Sonar is a sound wave to detect distances. I wonder if all distance sensors work on sonar or if you chose it for a specific reason.
Why do you want the robotic hand to repel from surfaces?
I believe the hand will grasp items ... maybe at a set distance higher than a surface. How will you figure the grasping in?
Awesome robot.
- Tyler Lucas October 5, 2017 - 9:15am
I don't actually want the arm to stay away from all surfaces. A method similar to this will keep the end-effector from bumping into large objects and the 'floor', and to scan an area to figure out where objects are. This blog post was to fulfill one of the requirements in assignment 2. Though I will first have this gizmo pick up a standard object at a set location, I may get it to look for various objects within an area, figure out if any of them are small and isolated enough (claw won't knock into other objects), then attempt to grab one of them and move it to another standard location or area.
There are many types of distance sensors, though sonar is pretty great for how cheap it is. Runner-up is infrared (see [link] for examples). The cheap versions of these technologies use time-of-flight to determine distance. (Phase difference is used in other arrangements of similar tech. Some motion sensors, which could tell you the distance to something with the right sensor arrangement, is often done with changes in infrared intensity.) I think Mataric goes through several distance sensors.
- Susanne Cardwell October 5, 2017 - 12:25pm
I looked at your code. Nice and lean. I feel encouraged that it didn't take a hundred pages of sketches to make that arm move.
- Tyler Lucas commented on the blog Combobulating Continuity via Connectors and Conductors
- Tyler Lucas commented on the blog Combobulating Continuity via Connectors and Conductors
- Tyler Lucas published a blog post Combobulating Continuity via Connectors and ConductorsComments
- Tyler Lucas September 28, 2017 - 1:56pm
This arm isn't the easiest to explain. It's based on Carlo Franciscone's EEZYbotARM MK2, modified to have more complex connections in that my version has different size ball-bearings in nearly every joint. I'll show you some of Carlo's great assembly photos from his website:
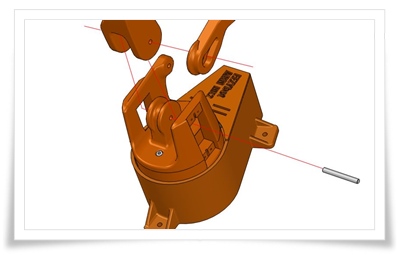
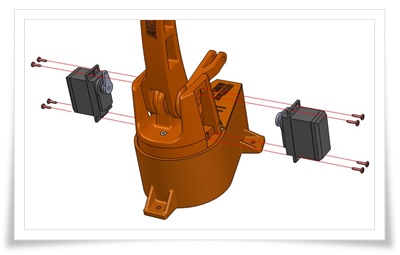
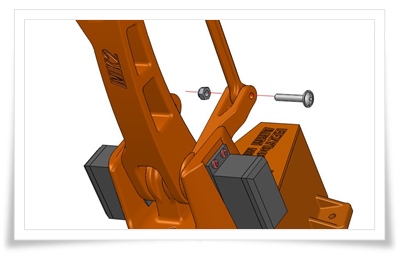
They're really just plain M3 and M3 bolts with lock nuts (nylon). I'd recommend at least a pair of washers in between the moving parts to reduce friction, and don't tighten the nut very much -- this is where the locking mechanism of the nut comes in handy, as a regular nut needs to be tightened against something or it will loosen off. I used a Power HD-1501MG and a MG946R servo and aluminum horns with M2 bolts/screws to lift the two parts of the arm.
If your arm doesn't need to lift much, don't use a bolt or anything else to support it, just attach the arm directly to the servo. The SparkFun Inventor's Kit (SIK) comes with a small servo: the "Micro Servo A0090" or "ROB-09065" or "SG90", similar to the popular Hitec HS-55. It comes with a bunch of white plastic horns. These attach to the servo output and can be screwed directly onto an arm, et voila. This is exactly what I did for my Shoddy Robotic Arm. (I actually used sticky tack to keep it together, but I don't recommend that.)
Here's the STEP file for my robot arm: [link]. It's a bit different from Carlo's MK2, and is not complete, but it shows the connections/joints clearly.
- Susanne Cardwell September 28, 2017 - 4:42pm
Nice reply. Thanks Tyler. Nice wiring on your robot too. The wires look cosmetic. Who'd ever guess something so visually nice would be primarily functional.
What program did you use to 3d print your robot? Did you measure the servos for your 3d print job?
Lastly, are there 2 servos for the sake of balance or do they kind of work like wheels? I believe that you spin one wheel faster than the other to get them to turn. Is that correct? Thank you.
- Tyler Lucas September 28, 2017 - 5:01pm
I use Autodesk Fusion 360 for 3D design, Simplify3D to slice models, and Octoprint (OctoPi on RPi2) to feed the printer with data. Any decent 3D design program can open that STEP file. I did measure the servos -- there is always a lot of measuring going on when designing connecting parts... The two servos you see in the photos above move two different parts of the arm. Mataric covers servos under 4.3.3 Servo Motors (p. 37...).
- Tyler Lucas commented on the blog Project Proposal: Automatic Object Relocation
- Tyler Lucas published a blog post Project Proposal: Automatic Object RelocationComments
- Anonymous User January 2, 2018 - 2:51am
Wow, you actually 3d printed some of the components. Very impressive! Way to set the bar. In your "about me" section, you mentioned that you have taken electrical engineering courses. Did you take the NAIT Diploma program or?
Cheers
- Tyler Lucas January 2, 2018 - 7:10am
Hey Shawn, thanks! I was in the EE Nanotech program at the UofA for many years (2004-2011'ish), but I didn't graduate. They didn't do 3D printing or robotics then, but it did give me taste enough in related fields to continue related hobby work.
- Anonymous User January 2, 2018 - 7:16am
I survived first year engineering and decided to finish my degree online with comp sci because it seems more flexible :)
- Tyler Lucas commented on the blog How To Calibrate an SR04 Sonar Distance Sensor with an Arduino
- Tyler Lucas published a blog post How To Calibrate an SR04 Sonar Distance Sensor with an ArduinoComments
- Susanne Cardwell September 20, 2017 - 8:22pm
Nice work, Tyler. Great data set. What Excel formula or function yielded the vertical line and the "y=0.146x-2.3843" function? Or did you enter the data into an Excel chart and automatically yielded the line and function? Thanks very much.
- Tyler Lucas September 20, 2017 - 9:39pm
Hey Susanna. The data was already linear so I just used Excel's 'show trendline' feature in its graphs. Automatic, like you said :)
- Tyler Lucas published a blog post Dealing with Sonar Sensor Interference
- Tyler Lucas commented on the blog How does a robot do stuff?
- Tyler Lucas published a blog post Where are all the robots?Comments
- peterde September 23, 2017 - 4:31pm
Tyler,
I just finished the book "Life 3.0 Being Human in the Age of Artificial Intelligence" by Max Tergmark (MIT). Extremely fascinating look at the questions humanity will need to deal with (now) if we are to have any measure of control over the possible future scenarios he presents for the coming AGI and superintelligence. The last chapter deals with the subject of consciousness, how it relates to subjective experience, and why it may be entirely possible for non-biological consciousness. It's exciting to think that consciousness theories such as Giulio Tononi's integrated information framework for neural-network-based consciousness are being tested presently In this light the current WestWorld is far more fascinating than the original from the 70's. Interesting post. Thanks.
- Tyler Lucas October 5, 2017 - 9:55am
The Life 3.0 book gets 4.26/5 stars on goodreads.com -- pretty impressive. I looked up the integrated information framework ("IIF"). Love how it attempts to deal directly with the hard problem of conciousness. I'll have to take a look -- thanks. (I haven't been able to take a stance on whether conciousness is necessary for general intelligence. There are many apparently solid arguments.)
Season 2 of Westworld is slated for Spring 2018. :)
- Tyler Lucas added a new discussion topic How will the first artificial intelligences be treated in our society?
- Tyler Lucas published a blog post How does a robot do stuff?Comments
- Susanne Cardwell September 15, 2017 - 6:26pm
Beautiful write-up, Tyler. Do you know motion parallax? I've dreamed of designing sensors to detect this phenomenon.
I noticed you're profilic with blogging for this course. What background do you bring to the course? Mechanical? Industrial Arts? Sciences? AutoCAD design? 3D printing? Curious! Thanks very much
- Tyler Lucas September 15, 2017 - 8:40pm
Hey Susanne. Yeah, I've done a bit of research on parallax, the bulk of it resulting from this xkcd comic: https://xkcd.com/941/ ; and a bit of photo manipulation tricks (3D effects by combining two photos). Sounds difficult to make a sensor for it. Could go with 'blob' or particle tracking over time with a single moving camera, comparing the change of many objects' positions from different vantage points; or binocular vision. Mataric talks about it a bit starting on page 114 (9.3.5 Stereo Vision).
I'm just putting stuff online to complete the course, and I enjoy writing. I've taken a bit of electrical engineering, have tinkered with electronics for over a decade, and armchair philosophy has always been a passion of mine. Nowadays I have a wee lab in my basement where I wish I could spend more time doing nerdy stuff. Mostly I just babble. ;)
- Susanne Cardwell September 15, 2017 - 8:57pm
Thanks Tyler! I'll definitely check out the comic. Great reply on parallax, and congrats on the electrical engineering background.
- Tyler Lucas commented on the blog A Shoddy Robotic Arm








 Loading
Loading {kind=link}