Athabasca University | AU Student/Staff Login | Invited Guest Login

Beyond PID

"Feedback control is a means of getting a system to achieve and maintain a desired state, usually called the set point, by continuously comparing its current state with its desired state." (Matarić, 2007, p. 121)
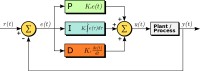
The most popular closed-loop control mechanisms are some combination of proportional, integral, and derivative feedback, together named a PID controller.
What are Proportional, Integral, and Derivative Feedback Mechanisms?
These mechanisms all need a measurement of the system’s current state compared to the desired state, called the error. A proportional mechanism sends feedback in direct proportion to the error, mainly influencing the speed of response. Derivative mechanisms use the rate of change of the error (the derivative!), mainly influencing the overshoot, related to system damping. An integral mechanism keeps track of the total sum (the integral!) of the error, which helps get rid of the absolute error.
Various PID controller configurations, used to heat a bundle of resistors, were compared in the blog post PID Without a Clue.
What’s wrong with PID? Why go beyond it?
PID controllers are fantastic. You don’t need to model your system, and their use is so widespread that tuning methods have been developed for all sorts of applications, making them an easy choice. They work especially well for single-input, single-output (SISO) linear systems without resonances, and that do not change their behaviour over time (for example, after warming up). It is a great observer mechanism – one with no information about the system itself.
For those multiple-input, multiple-output (MIMO) non-linear systems, and those whose performance need improving, it may be a good idea to look into other feedback mechanisms.
Other Control Techniques [Wikipedia.org link]
- Adaptive control uses on-line identification of the process parameters, or modification of controller gains, thereby obtaining strong robustness properties.
- A hierarchical control systemis a type of control system in which a set of devices and governing software is arranged in a hierarchical tree. When the links in the tree are implemented by a computer network, then that hierarchical control system is also a form of networked control system.
- Intelligent control uses various AI computing approaches like neural networks, Bayesian probability, fuzzy logic, machine learning, evolutionary computation and genetic algorithms.
- Optimal control is where the control signal optimizes a certain "cost index". Two optimal control design methods widely used in industrial applications are Model Predictive Control (MPC) and linear-quadratic-Gaussian control (LQG). The first can more explicitly consider constraints on the signals in the system, which is an important feature in many industrial processes. However, the "optimal control" structure in MPC is only a means to achieve such a result, as it does not optimize a true performance index of the closed-loop control system. Together with PID controllers, MPC systems are the most widely used control technique in process control.
- Robust control deals explicitly with uncertainty in its approach to controller design. They tend to be able to cope with small differences between the true system and the nominal model used for design.
- Stochastic control deals with control design with uncertainty in the model. In typical stochastic control problems, it is assumed that there exist random noise and disturbances in the model and the controller.
- Energy-shaping control view the plant and the controller as energy-transformation devices. The control strategy is formulated in terms of interconnection (in a power-preserving manner) to achieve a desired behavior.
- Self-organized criticality control may be defined as attempts to interfere in the processes by which the self-organized system dissipates energy.
What’s an easy way to improve the performance of my PID controller?
Information overload! We don’t have time to finish our PhD’s in control theory – we have robots to build! What are a few things we can do to improve over a simple PID model?
The first thing one can do is to better tune your controller. Tuning really means setting the coefficients of the P, I, and D terms, setting limits to the derivative and integral terms, and sometimes tweaking your sample rate and drive term update rate. Proven methods include Zeigler-Nichols, Tyreus Luyben, Cohen-Coon, Åström-Hägglund, and using software tools.
The best thing to do is to address the main limitation of PID – it has no knowledge of the process under control – by combining it with an Open-loop or feed-forward controller. These use a system model, often simplified, to predict the appropriate response to an input. Modeling the system allows more intelligent sensor measurement conditioning, especially useful for reducing noise in the derivative term and limiting the effect of the integral term.
There are many other improvements one can make to a PID controller, the above few being relatively easy and having a large impact on performance.
- Circuit 5B: Remote-Controlled Robot - Unleashing Robotic Mobility

November 1, 2023 - 12:08am
Victor Okpube - Circuit 5C: Autonomous Robot
November 1, 2023 - 12:10am
Victor Okpube - Assignment 2 Weblog

October 2, 2023 - 5:57am
Victor Okpube - Circuit 5C: Autonomous Robot
November 1, 2023 - 12:18am
Victor Okpube
Comments
Thanks Tyler. Your article stimulated an interest in intelligence control for me.